2016-03-16 (水)
ジャイロセンサ,そこそこ安定して動いてて1/1000ラジアン/秒程度の精度で取れる.地球が自転してるのをデータ上でも見れるかなと思って眺めてたけど,もう少し精度が良くないと(目で見る限りは)ノイズに埋もれてしまうな.
* B3M-SC-1040-Aのステップ応答
一通り揃ってきたので,サーボの挙動を調べる.
posはサーボへの位置指定. servoはサーボが報告してきた位置.gyroがジャイロセンサから求めた位置.一応スペック通りの動作をしている.
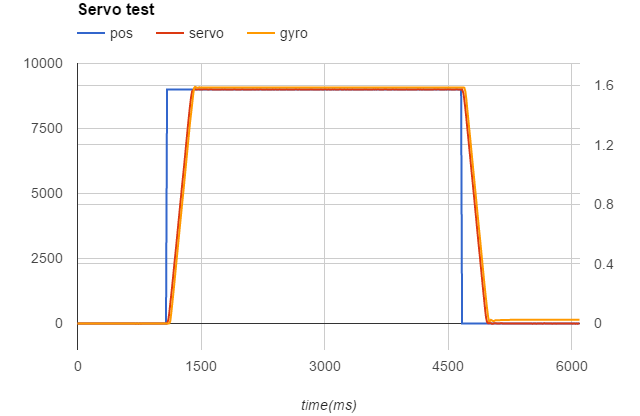
最後少しずれてるのは固定が適当なせいなのもありそう.いきなり計算通りに動くと嬉しい.左軸が1/100度.右がラジアン.サーボが1/100度で出してくるのをそのまま出力したせいで2軸になってる.
立ち上がり部分.
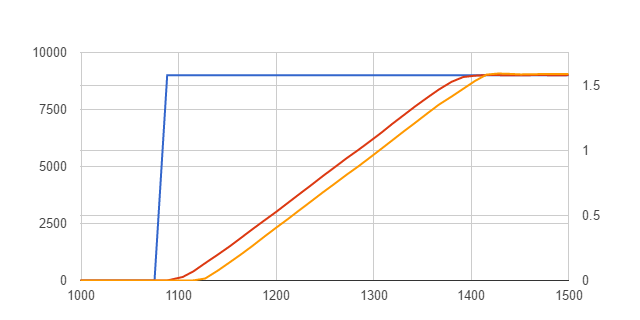
それなりに上手く動いているけど,ジャイロの値が50msくらい遅れてるように見えるな...
