回路関係の確認
回路の仕様
使えるもの.
- LED4つ
- モータが2つ
- サーボ1つ
- センサー4つ(ライントレース用に3つ配布)
これでライントレースロボットを作っていきます.
回路図
まず,どんな回路を作るのかを確認.
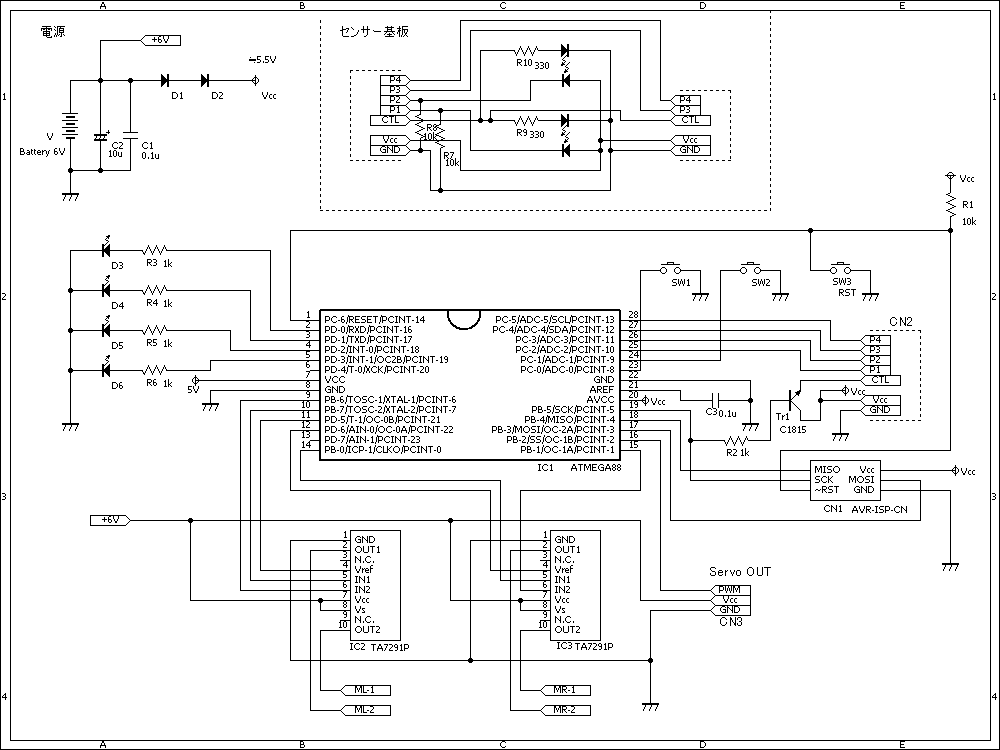
AVRの電源電圧は4.5~5.5Vですが,6Vでも問題が起きることは無さそうです.念のため,ダイオードを直列に2つ入れて電圧を落としています.気休めにしかなりませんが.
この回路は2006年のものですが,設計ミスがあります.2007年度のものからは修正されているはずです.
ピンと回路の関係
| ピン | モード | 回路 |
|---|---|---|
| PD0 | OUT | LED0 |
| PD1 | OUT | LED1 |
| PD2 | OUT | LED2 |
| PD3 | OUT | LED3 |
| PB7 | OUT | 左モータ IN1 |
| PB6 | OUT | 左モータ IN2 |
| PD5 | PWM | 左モータ PWM |
| PB0 | OUT | 右モータ IN1 |
| PB1 | OUT | 右モータ IN2 |
| PD6 | PWM | 右モータ PWM |
| PB2 | PWM | サーボ PWM |
| PC0 | IN | ボタン1 |
| PC1 | IN | ボタン2 |
| PC2 | A/D | センサー1 |
| PC3 | A/D | センサー2 |
| PC4 | A/D | センサー3 |
| PC5 | A/D | センサー4 |
AVRライタ用ケーブル
ピン配置
今回使うライタの電源はPCのUSBから供給されるので,Vccを接続する必要はありません.
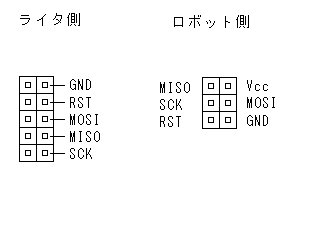
ロボット側の書き込み用のピン配列はAtmel標準のものなので,他のライタからも書き込めると思います.
この文書の履歴
- 2006-06-30 作成
Copyright © binzume all rights reserved.